【论文笔记】VI-Net: Boosting Category-level 6D Object Pose Estimation via Learning Decoupled Rotations on the Spherical Representations
VI-Net: Boosting Category-level 6D Object Pose Estimation via Learning Decoupled Rotations on the Spherical Representations
| 方法 | 类型 | 训练输入 | 推理输入 | 输出 | pipeline |
|---|---|---|---|---|---|
| VI-Net | 类别级 | RGBD + 物体类别 | RGBD + 物体类别 | 绝对\(\mathbf{R}, \mathbf{t}, \mathbf{s}\) |
- 2025.04.01:类别级方法,使用一个网络估计旋转,另一个网络估计平移和缩放,24年CVPR SecondPose沿用了这个方法,对于旋转,该方法将旋转估计分为视角旋转和面内旋转,视作一个分类任务,分别估计,最后组合;对于平移和缩放,该方法使用PointNet++提取特征,直接估计平移和旋转
Abstract
1. Introduction
2. Related Work
3. Correlation on the Sphere and Rotation Decomposition
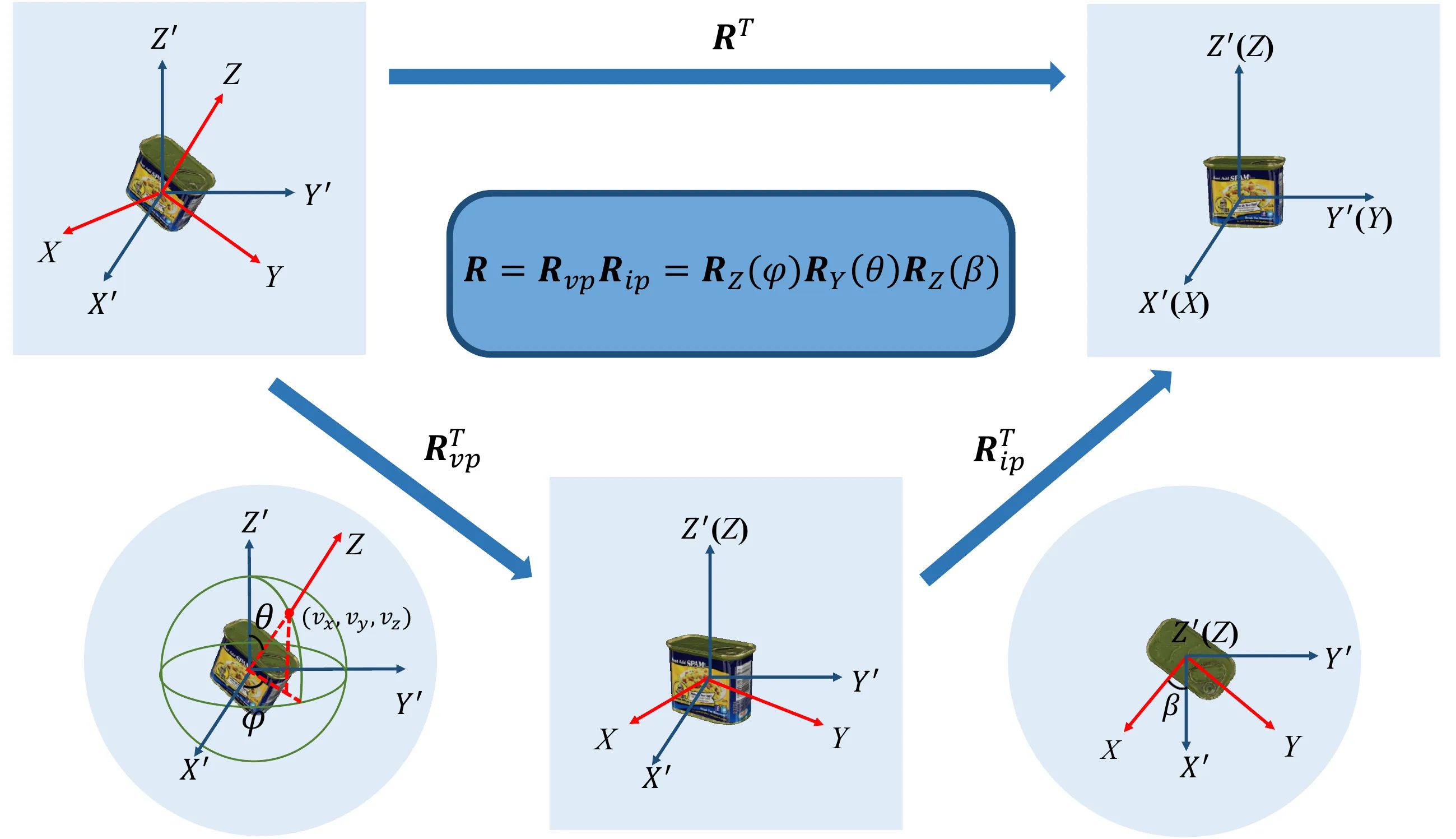
如图1所示,使用\(\mathbf{R}^T\)将物体坐标系XYZ与相机坐标系X'Y'Z'对齐(假设物体坐标系的XYZ的原点和相机坐标系的X'Y'Z'的原点重合),这个过程可以分为两步:
- 第一步是将Z'轴与Z轴对齐,这一步由旋转矩阵\(\mathbf{R}_{vp}^T\)实现,“vp”代表的是“viewpoint”,即视角;
- 第二步是将X'轴和Y'轴旋转到X轴和Y轴,这一步由旋转矩阵\(\mathbf{R}_{ip}^T\)实现,“ip”代表的是“in-plane”,即平面内。
那么将物体坐标系XYZ与相机坐标系X'Y'Z'对齐的过程可以表示为:\(\mathbf{R}^T = \mathbf{R}_{ip}^T\mathbf{R}_{vp}^T\)。
由于在\(SO(3)\)中,矩阵的转置就是矩阵的逆,那么将物体坐标系XYZ和相机坐标系X'Y'Z'恢复到原来的相对位置的过程可以表示为:
\[ \begin{equation}\label{eq1} \mathbf{R} = \mathbf{R}_{vp}\mathbf{R}_{ip}, \end{equation} \]
现在从物体坐标系XYZ和相机坐标系X'Y'Z'对齐时的状态出发,假设在物体坐标系Z轴上有一点\((0, 0, 1)\),使用\(\mathbf{R} = \mathbf{R}_{vp}\mathbf{R}_{ip}\)的过程恢复到原来的相对位置,同样也分为两步:
首先使用\(\mathbf{R}_{ip}\)让物体坐标系XYZ旋转绕Z'轴旋转\(\beta \in [0, 2\pi]\),其旋转矩阵为:
\[ \begin{equation}\label{eq2} \mathbf{R}_{ip} = \begin{bmatrix} \cos\beta & -\sin\beta & 0 \\ \sin\beta & \cos\beta & 0 \\ 0 & 0 & 1 \end{bmatrix}. \end{equation} \]
此时,物体坐标系XYZ与相机坐标系X'Y'Z'不完全重合(Z轴与Z'轴是重合的,但X轴与X'轴、Y轴与Y'轴不重合),先将物体绕着Y'轴旋转\(\theta \in [0, \pi]\),其旋转矩阵为:
\[ \mathbf{R}_Y(\theta) = \begin{bmatrix} \cos\theta & 0 & \sin\theta \\ 0 & 1 & 0 \\ -\sin\theta & 0 & \cos\theta \end{bmatrix}; \]
再将物体绕着Z'轴旋转\(\varphi \in [0, 2\pi]\),其旋转矩阵为:
\[ \mathbf{R}_Z(\varphi) = \begin{bmatrix} \cos\varphi & -\sin\varphi & 0 \\ \sin\varphi & \cos\varphi & 0 \\ 0 & 0 & 1 \end{bmatrix}; \]
那么结合上面的第2步和第3步,Z轴上的这一点的坐标变为\((v_x, v_y, v_z)\),那么可以计算\((r, \varphi, \theta)\)为(这里我不理解,我觉得公式是错的):
\[ \begin{equation}\label{eq3} \left\{\begin{matrix} \begin{aligned} r &= 1 \\ \varphi &= \arctan(\frac{v_x}{v_z}) \\ \theta &= \arccos(\frac{v_y}{r}) \end{aligned} \end{matrix}\right., \end{equation} \]
结合\(\mathbf{R}_Y(\theta)\)和\(\mathbf{R}_Z(\varphi)\),可以得到:
\[ \begin{equation}\label{eq4} \begin{aligned} \mathbf{R}_{vp} &= \mathbf{R}_Z(\varphi)\mathbf{R}_Y(\theta) \\ &= \begin{bmatrix} \cos\varphi & -\sin\varphi & 0 \\ \sin\varphi & \cos\varphi & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} \cos\theta & 0 & \sin\theta \\ 0 & 1 & 0 \\ -\sin\theta & 0 & \cos\theta \end{bmatrix} \end{aligned}. \end{equation} \]
结合\(\eqref{eq4}\)和\(\eqref{eq2}\),可以发现\(\mathbf{R} = \mathbf{R}_{vp}\mathbf{R}_{ip}\)与ZYZ欧拉角\(\varphi, \theta, \beta\)的参数化一致。
根据以上推导,估计物体的旋转可以分解为两个步骤:
- 在球体上搜索点\((v_x, v_y, v_z)\),以获得\(\varphi\)和\(\theta\),共同得到视角旋转\(\mathbf{R}_{vp}\);
- 通过\(\mathbf{R}_{vp}\)将Z'轴与Z轴对齐,然后回归面内旋转\(\mathbf{R}_{ip}\)。
4. VI-Net for Rotation Estimation
4.1. Conversion as Spherical Representations
给定一个点集\(\mathcal{P} \in \mathbb{R}^{N \times 3}\),每一个点都对应一个特征\(\mathcal{F} \in \mathbb{R}^{N \times C_0}\)(比如径向距离、RGB值、表面法线等),首先使用“Learning SO(3) Equivariant Representations with Spherical CNNs”和“DualPoseNet: Category-level 6D Object Pose and Size Estimation Using Dual Pose Network with Refined Learning of Pose Consistency”中的方法,生成在球体上定义的特征图\(\mathcal{S}_0 \in \mathbb{R}^{C_0 \times H_0 \times W_0}\),其中\(N\)是点的数量,\(H_0 \times W_0\)是球面采样分辨率,\(C_0\)是特征维度(比如\(C_0 = 1\)为径向距离,\(C_0 = 3\)为RGB值或表面法线)。

具体来说,将球面坐标系沿方位轴(水平方向)和倾角轴(竖直方向)均匀的划分为\(H_0 \times W_0\)个网格(如图3所示),在每一个网格中,我们搜索径向距离最大的点,表示为\(\mathbf{p}_{h, w}^{max}\),并让\(\mathcal{S}_0(h, w) = \mathbf{f}_{h, w}^{max} \in \mathcal{F}\),对应于\(\mathbf{p}_{h, w}^{max}\);如果这个区域内没有点,则让\(\mathcal{S}_0(h, w) = \mathbf{0}\)。
4.2. Spherical Feature Pyramid Network
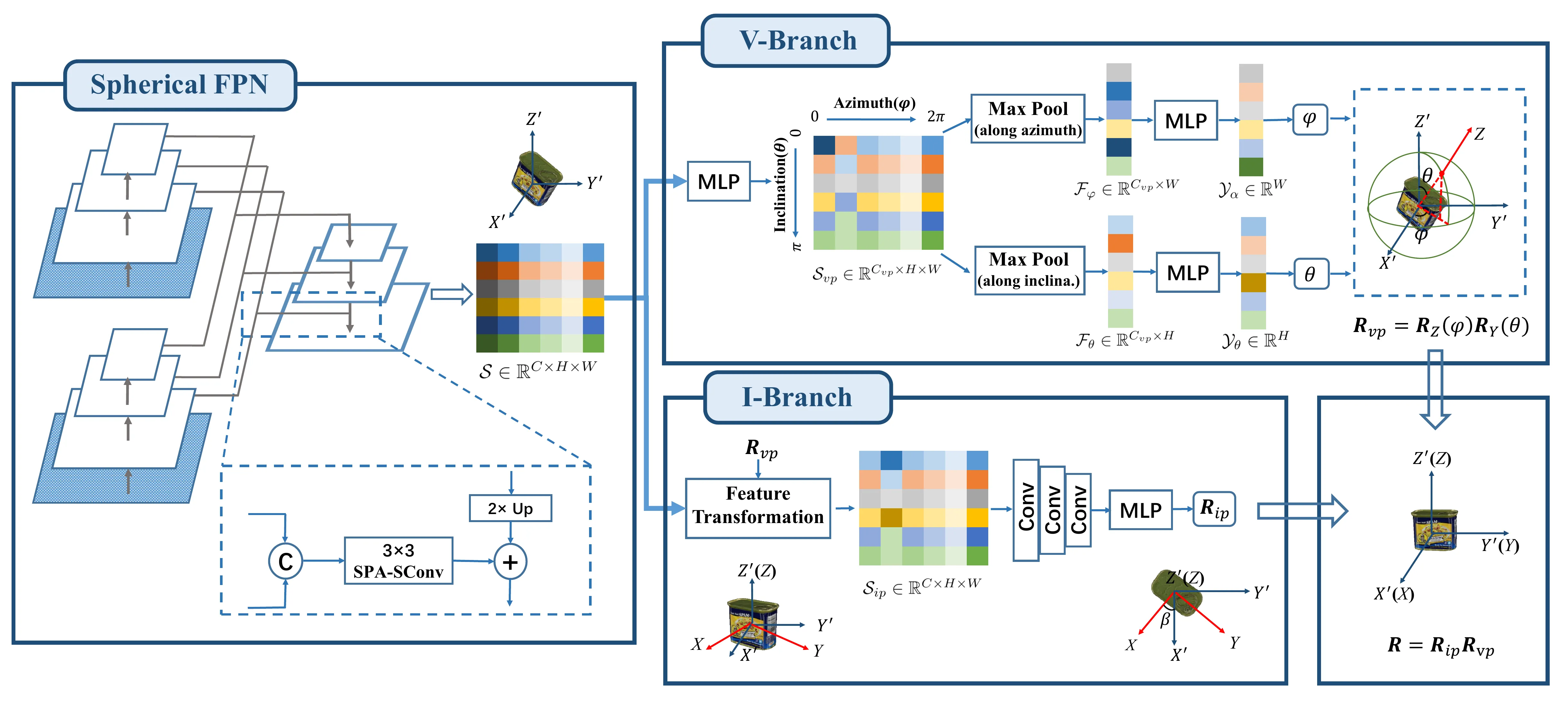
使用ResNet18构建特征金字塔网络(FPN),用SPAtial Spherical Convolutions (SPA-SConvs),代替传统的2D卷积,得到高级语义球形特征图\(\mathcal{S} \in \mathbb{R}^{C \times H \times W}\),如图2所示。第5部分中会有详细介绍。
4.3. V-Branch
V-Branch估计视角旋转\(\mathbf{R}_{vp}\),视角旋转中包含了方位角\(\varphi\)和倾角\(\theta\),为了简化任务,可以分别估计\(\varphi\)和\(\theta\),这也有效缓解了正负样本对不平衡的问题。图2给出了V-Branch的图示。
以两层MLP提升\(\mathcal{S}\)的特征维度,得到\(\mathcal{S}_{vp} \in \mathbb{R}^{C_{vp} \times H \times W}\)。为了学习水平方位角\(\varphi\),在竖直方向上的倾角维度对\(S_{vp}\)进行最大池化,得到\(\mathcal{F}_\varphi \in \mathbb{R}^{C_{vp} \times W}\),再将其送入另一个MLP中得到\(W\)方位角区域的概率图\(\mathcal{Y}_\alpha \in \mathbb{R}^W\)。\(\mathcal{Y}_\alpha\)中的每一个元素都表示该区域成为目标的可能性。将具有最大概率的元素的索引表示为\(w_{max}\),则有:
\[ \begin{equation}\label{eq5} \varphi = \frac{w_{max} + 0.5}{W} \times 2\pi. \end{equation} \]
同样,对于倾角\(\theta\),沿水平方向上的方位角维度对\(S_{vp}\)进行最大池化,得到\(\mathcal{F}_\theta \in \mathbb{R}^{C_{vp} \times H}\),然后得到\(\mathcal{Y}_\beta \in \mathbb{R}^H\),那么\(\theta\)可以计算如下:
\[ \begin{equation}\label{eq6} \theta = \frac{h_{max} + 0.5}{H} \times \pi. \end{equation} \]
其中\(h_{max}\)是\(\mathcal{Y}_\beta\)中最大概率的索引。最后,结合\(\eqref{eq5}\)、\(\eqref{eq6}\)和\(\eqref{eq4}\),可以得到视角旋转\(\mathbf{R}_{vp} = \mathbf{R}_Z(\varphi)\mathbf{R}_Y(\theta)\)。
4.4. I-Branch
在V-Branch之后,我们已经得到了视角旋转\(\mathbf{R}_{vp}\),那么就可以使用\(\mathbf{R}_{vp}\)将Z'轴与Z轴对齐(如图1所示)。对齐后可以构建一个新的球面特征图\(S_{ip} \in \mathbb{R}^{C \times H \times W}\)。\(\mathcal{S}\)的视点不变性使得在特征空间中实现变换以获得\(S_{ip}\)成为可能。
对于分辨率为\(H \times W\)的规则球面映射,我们将所有\(HW\)离散锚点的中心点表示为点集\(\mathcal{G} = \{\mathbf{g}\}\)。当我们用\(\mathbf{R}_{vp}\)将点集\(\mathcal{P} = \{\mathbf{p}\}\)旋转到\(\mathcal{P}^\prime = \{\mathbf{p}^\prime\} = \{\mathbf{R}_{vp}^T\mathbf{p}\}\)时,\(\mathcal{S}\)的锚点也旋转为\(\mathcal{G}^\prime = \{\mathbf{g}^\prime\} = \{\mathbf{R}_{vp}^T\mathbf{g}\}\);我们将\(\mathbf{g}^\prime\)的特征标记为\(\mathcal{S}^{\mathbf{g}^\prime}\)。
为了从顶部观察物体,需要为变换后的\(\mathcal{P}^\prime\)构建一个新的球形特征图\(\mathcal{S}_{ip}\)。对于\(\mathcal{S}_{ip}\),我们使用“PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space”中的点特征加权插值方法,在每个锚点\(\mathbf{g}\)上生成其特征,表示为\(\mathcal{S}_{ip}^\mathbf{g}\),如下所示:
\[ \begin{equation}\label{eq7} \mathcal{S}_{ip}^\mathbf{g} = \frac{\sum_{i = 1}^k a_i \mathcal{S}^{\mathbf{g}^\prime_i}}{\sum_{i = 1}^k a_i}, \end{equation} \]
其中\(a_i = \frac{1}{\Vert\mathbf{g} - \mathbf{g}^\prime_i\Vert}\)是按点距离衡量的插值权重,\(\{\mathbf{g}_i^\prime\}_{i = 1}^k \subset \mathcal{G}^\prime\)是\(\mathbf{g}\)的\(k\)个最近邻。
通过\(\eqref{eq7}\)实现从\(\mathcal{S}\)到\(\mathcal{S}_{ip}\)的转换后,使用卷积来降低\(\mathcal{S}_{ip}\)的分辨率,并为\(\mathbf{R}_{ip}\)的回归提取一个全局特征图,如图2所示。旋转的连续6D表示作为回归的输出,然后转换为旋转矩阵\(\mathbf{R}_{ip}\)。这里预测的\(\mathbf{R}_{ip}\)并不只包含面内旋转,而是残差视点旋转和精确面内旋转的组合。
4.5. Training of VI-Net
对于V-Branch,使用来自“Focal Loss for Dense Object Detection”的焦点损失,给定GT \(\hat{\mathcal{Y}}_\varphi \in \mathbb{R}^W\)和\(\hat{\mathcal{Y}}_\theta \in \mathbb{R}^H\),损失函数为:
\[ \begin{equation}\label{eq8} \mathcal{L}_{vp} = \mathcal{D}_{FL}(\mathcal{Y}_\varphi, \hat{\mathcal{Y}}_\varphi) + \mathcal{D}_{FL}(\mathcal{Y}_\theta, \hat{\mathcal{Y}}_\theta), \end{equation} \]
其中:
\[ \begin{equation}\label{eq9} \mathcal{D}_{FL}(\mathcal{Y}, \hat{\mathcal{Y}}) = \frac{1}{M} \sum_{i = 1}^M -\alpha(1 - t_{i, t})^\gamma \log(y_{i, t}), \end{equation} \]
且:
\[ \begin{equation}\label{eq10} y_{i, t} = \begin{cases} y_i, & \text{if} & \hat{y}_i = 1 \\ 1 - y_i, & \text{if} & \hat{y}_i = 0 \end{cases}, \end{equation} \]
其中\(\mathcal{Y} = \{y_i\}_{i = 1}^M\),\(\hat{\mathcal{Y}} = \{\hat{y}_i \in \{0, 1\}\}_{i = 1}^M\)。\(\alpha\)是权重因子,\(\gamma\)表示调节因子的指数。
给定GT \(\hat{\mathbf{R}}\),我们对I-Branch的输出\(\mathbf{R} = \mathbf{R}_{vp}\mathbf{R}_{ip}\)监督如下:
\[ \begin{equation}\label{eq11} \mathcal{L}_{ip} = \Vert\mathbf{R} - \hat{\mathbf{R}}\Vert = \Vert\mathbf{R}_{vp}\mathbf{R}_{ip} - \hat{\mathbf{R}}\Vert. \end{equation} \]
结合\(\eqref{eq8}\)和\(\eqref{eq11}\),VI-Net的训练目标为:
\[ \begin{equation}\label{eq12} \min \mathcal{L} = \mathcal{L}_{ip} + \lambda \mathcal{L}_{vp}. \end{equation} \]
其中\(\lambda\)是平衡两个损失的权重因子。
5. Spatial Spherical Convolution
方法建立具有规则2D空间大小的球形特征图以实现旋转估计,特征图建立后,就可以使用传统的2D卷积来处理球形信号。但是,直接在球形特征图上使用2D卷积会有边界问题,比如特征图\(S_0\)上的\(S_0(h, 1)\)和\(S_0(h, W)\)在球面上是相连的,而在特征图中则有很大的距离。此外,为了支持I-Branch中的特征转换以便从天顶方向查看,backbone中的卷积也需要是视角一致的。这里提出了SPAtial Spherical Convolution,即SPA-SConv,在球面上连续提取视角一致的特征,可以灵活的适应现有的卷积架构,例如4.2节中的FPN。
给定输入球面特征图\(\mathcal{S}_l \in \mathbb{R}^{C_l \times H_l \times W_l}\)和卷积参数(如卷积核大小\(K\)、步长\(s\)和输出通道数\(C_{l + 1}\)等),我们分两步实现SPA-SConv:
- 将\(\mathcal{S}_l\)padding到\(S_l^{pad} \in \mathbb{R}^{C_l \times (H_l + 2P) \times (W_l + 2P)}\),其中\(P = \frac{K - 1}{2}\);
- 将对称卷积应用于\(S_l^{pad}\),基于没有padding的常规2D卷积,得到输出球面特征图\(\mathcal{S}_{l + 1} \in \mathbb{R}^{C_{l + 1} \times H_{l + 1} \times W_{l + 1}}\),其中\(H_{l + 1} = \lfloor\frac{H_l}{s}\rfloor\),\(W_{l + 1} = \lfloor\frac{W_l}{s}\rfloor\)(为简单起见,我们假设2D卷积核的长度和宽度都是\(K\),\(K\)是一个奇数)。
图3可视化了从\(\mathcal{S}_l\)到\(S_l^{pad}\)的padding过程。首先,将\(\mathcal{S}_l\)的中心作为\(\mathcal{S}_l^{pad}\)的中心:
\[ \begin{equation}\label{eq13} S_l^{pad}(h + P, w + P) = \mathcal{S}_l(h, w), \end{equation} \]
对于\(\forall h = 1, 2, \cdots, H_l\)和\(\forall w = 1, 2, \cdots, W_l\)。接下来,我们沿倾角方向填充\(\mathcal{S}_l\):
\[ \begin{equation}\label{eq14} \begin{aligned} S_l^{pad}(p, w + P) &= \mathcal{S}_l^{pad}(2P - p + 1, w^\prime), \\ \text{and } S_l^{pad}(H_l + P + p, w + P) &= \mathcal{S}_l^{pad}(H_l + P - p + 1, w^\prime), \end{aligned} \end{equation} \]
其中:
\[ \begin{equation}\label{eq15} w^\prime = \begin{cases} w + \frac{W_l}{2} + P & \text{if} & w \le \frac{W_l}{2} \\ w - \frac{W_l}{2} + P & & \text{otherwise} \end{cases}, \end{equation} \]
对于\(\forall p = 1, 2, \cdots, P\)和\(\forall w = 1, 2, \cdots, W_l\)。最后,我们沿方位角方向填充\(\mathcal{S}_l\):
\[ \begin{equation}\label{eq16} \begin{aligned} S_l^{pad}(h, p) &= \mathcal{S}_l^{pad}(h, W_l + p), \\ \text{and } S_l^{pad}(h, W_l + P + p) &= \mathcal{S}_l^{pad}(h, P + p), \end{aligned}, \end{equation} \]
对于\(\forall p = 1, 2, \cdots, P\)和\(\forall w = 1, 2, \cdots, W_l\)。
得到\(S_l^{pad}\)后,我们就可以使用2D卷积来实现视点一致的对称卷积运算:
\[ \begin{equation}\label{eq17} \mathcal{S}_{l + 1} = \text{Max}(\text{Conv}(\mathcal{S}_l^{pad}; \kappa_l), \text{Conv}(\mathcal{S}_l^{pad}, \text{Flip}(\kappa_l))), \end{equation} \]
其中,\(\text{Conv}\)表示2D卷积、\(\text{Flip}\)表示卷积核的水平翻转、\(\text{Max}\)表示元素级最大池化。根据“PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation”中的方法,\(\text{Max}\)作为对称函数来聚合特征,并保持视点一致的性质,补充材料中给出了此特性的证明。
6. Category-level 6D Object Pose Estimation
VI-Net估计\(\mathbf{R}, \mathbf{t}, \mathbf{s}\),且在推理时CAD模型不可用。给定一张RGBD图,首先使用MaskRCNN分割物体,对于每个裁剪出的具有点集\(\mathcal{P} = \{\mathbf{p}\}\)的物体,首先使用PointNet++估计\(\mathbf{t}\)和\(\mathbf{s}\),然后在旋转估计时,将估计出的\(\mathbf{t}\)和\(\mathbf{s}\)作为初始化输入到VI-Net中进行归一化:\(\mathcal{P}^\prime = \{\frac{\mathbf{p} - \mathbf{t}}{\Vert\mathbf{s}\Vert}\}\),最后使用VI-Net估计\(\mathbf{R}\)。
6.1. Experimental Setups
6.2. Comparisons with Existing Methods
| Method |
Use of Shape Priors |
REAL275 | CAMERA25 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| IoU75∗ | 5°2cm | 5°5cm | 10°2cm | 10°5cm | IoU75∗ | 5°2cm | 5°5cm | 10°2cm | 10°5cm | ||
| NOCS [31] | ✕ | 9.4 | 7.2 | 10.0 | 13.8 | 25.2 | 37.0 | 32.3 | 40.9 | 48.2 | 64.6 |
| FS-Net [5] | ✕ | - | - | 28.2 | - | 60.8 | - | - | - | - | - |
| DualPoseNet [20] | ✕ | 30.8 | 29.3 | 35.9 | 50.0 | 66.8 | 71.7 | 64.7 | 70.7 | 77.2 | 84.7 |
| GPV-Pose [8] | ✕ | - | 32.0 | 42.9 | - | 73.3 | - | 72.1 | 79.1 | - | 89.0 |
| SS-ConvNet [18] | ✕ | - | 36.6 | 43.4 | 52.6 | 63.5 | - | - | - | - | - |
| PN2 + VI-Net (Ours) | ✕ | 48.3 | 50.0 | 57.6 | 70.8 | 82.1 | 79.1 | 74.1 | 81.4 | 79.3 | 87.3 |
| SPD [28] | ✓ | 27.0 | 19.3 | 21.4 | 43.2 | 54.1 | 46.9 | 54.3 | 59.0 | 73.3 | 81.5 |
| CR-Net [32] | ✓ | 33.2 | 27.8 | 34.3 | 47.2 | 60.8 | 75.0 | 72.0 | 76.4 | 81.0 | 87.7 |
| CenterSnap-R [14] | ✓ | - | - | 29.1 | - | 64.3 | - | - | 66.2 | - | 81.3 |
| ACR-Pose [10] | ✓ | - | 31.6 | 36.9 | 54.8 | 65.9 | - | 70.4 | 74.1 | 82.6 | 87.8 |
| SAR-Net [17] | ✓ | - | 31.6 | 42.3 | 50.3 | 68.3 | - | 66.7 | 70.9 | 75.3 | 80.3 |
| SSP-Pose [37] | ✓ | - | 34.7 | 44.6 | - | 77.8 | - | 64.7 | 75.5 | - | 87.4 |
| SGPA [4] | ✓ | 37.1 | 35.9 | 39.6 | 61.3 | 70.7 | 69.1 | 70.7 | 74.5 | 82.7 | 88.4 |
| RBP-Pose [36] | ✓ | - | 38.2 | 48.1 | 63.1 | 79.2 | - | 73.5 | 79.6 | 82.1 | 89.5 |
| SPD + CATRE [23] | ✓ | 43.6 | 45.8 | 54.4 | 61.4 | 73.1 | 76.1 | 75.4 | 80.3 | 83.3 | 89.3 |
| DPDN [19] | ✓ | - | 46.0 | 50.7 | 70.4 | 78.4 | - | - | - | - | - |
![Figure 4. Qualitative comparisons between the state-of-the-art method of DPDN [19] and our proposed one on REAL275 dataset [31].](https://img.032802.xyz/paper-reading/2023/vi-net-boosting-category-level-6d-object-pose-estimation-via-learning-decoupled-rotations-on-the-spherical-representations_2023_Lin/vis_sota.webp)
![Figure 5. Plottings of per-category average precision versus different rotation/translation error thresholds for our proposed method on REAL275 dataset [31].](https://img.032802.xyz/paper-reading/2023/vi-net-boosting-category-level-6d-object-pose-estimation-via-learning-decoupled-rotations-on-the-spherical-representations_2023_Lin/mAP.webp)
6.3. Ablation Studies and Analyses
| R.D. | 5°2cm | 5°5cm | |
|---|---|---|---|
| Baseline1: Avg Pool + MLP | ✕ | 45.0 | 51.8 |
| Baseline2: Flattening + MLP | ✕ | 42.7 | 48.8 |
| VI-Net | ✓ | 50.0 | 57.6 |
| Variants of V-Branch | Feature Trans. in I-Branch | 5°2cm | 5°5cm | 10°2cm | 10°5cm |
|---|---|---|---|---|---|
| Direct Regression | ✕ | 26.3 | 28.9 | 54.1 | 61.1 |
| Binary Classification (1-branch) | ✕ | 30.8 | 34.4 | 65.5 | 75.3 |
| Binary Classification (2-branch) | ✕ | 33.7 | 37.9 | 65.4 | 75.4 |
| Direct Regression | ✓ | 43.1 | 48.3 | 68.0 | 78.1 |
| Binary Classification (1-branch) | ✓ | 49.3 | 56.9 | 69.4 | 79.7 |
| Binary Classification (2-branch) | ✓ | 50.0 | 57.6 | 70.8 | 82.1 |
|
Type of Convolution |
Padding |
Symmetric Operation |
5°2cm | 5°5cm |
|---|---|---|---|---|
| SPE-SConv [9] | - | - | 35.1 | 40.8 |
| SPA-SConv | ✕ | ✕ | 46.9 | 53.2 |
| ✕ | ✓ | 48.5 | 55.5 | |
| ✓ | ✓ | 50.0 | 57.6 |
| 5°2cm | 5°5cm | 10°2cm | 10°5cm | |
|---|---|---|---|---|
| VI-Net+ts | 45.0 | 56.0 | 65.9 | 80.5 |
| PN2 + VI-Net | 50.0 | 57.6 | 70.8 | 82.1 |
| Data Type | 5°2cm | 5°5cm | 10°2cm | 10°5cm |
|---|---|---|---|---|
| Depth | 43.0 | 52.1 | 64.3 | 77.0 |
| RGB + Depth | 50.0 | 57.6 | 70.8 | 82.1 |
